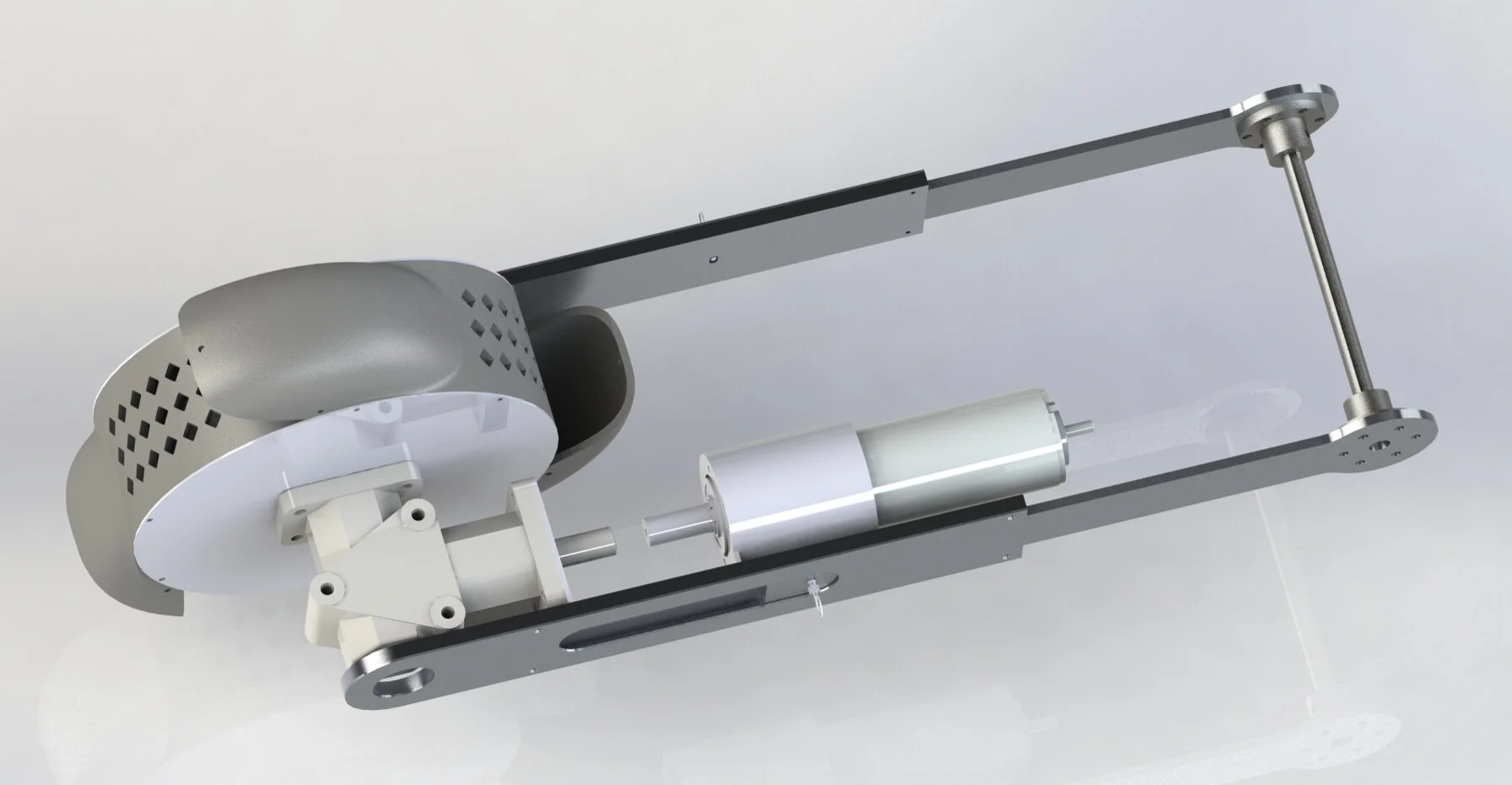
Aluminum Extendable Arms

This is a passive slider design that is designed specifically to be as thin as possible to let it fit within the specification of the robot and still be able to withstand immense forces.

The purpose of the arm is to have the bucket drum digger extend to a position at deployment to exceed the set size limitations in NASA’s RMC competition.
The way the arms work is by having a spring-loaded pin on the inner arm that will lock at a set distance through a slot in the outer arm, keeping it in place at the ideal length.
prototype video